pewduino Sensor (Oberseite)
Ich war ungeduldig. Da die Hardware im Wesentlichen schon klar ist, und nur noch die Software der Sensoren nach Vollendung schreit, habe ich mir eine runde Sensorplatine gelayoutet.
Dank des Internets war schnell klar, welches Programm dafür geeignet ist. Ich habe die Freeware Version der Software “Eagle” von CADSOFT genommen. Nach ein paar Tutorial-Videos und Google-Suchen konnte ich eine kleine Platine zaubern.
Da ich die Platine noch nicht erhalten habe, kann ich an dieser Stelle nur mal eine grobe 3D-Visualisierung anbieten. Wie zu erkennen ist, werden wir 3x Vishay TSOP31238 auf einer Platine verwenden. In 120°-Anordnung wird eine größtmögliche Abdeckung bzw. Erkennung erreicht. Viele “Konkurrenten” im Internet beschränken sich auf einen oder maximal zwei IR-Receivern. Allerdings lässt sich aus den Datenblättern erkennen, in welchen Bereichen der TSOP eben noch zuverlässig IR erkennen kann, oder eben nicht.
Außerdem werden die Sensoren in SMD-Bauweise hergestellt. Aus Platzgründen ist es nicht anders möglich.
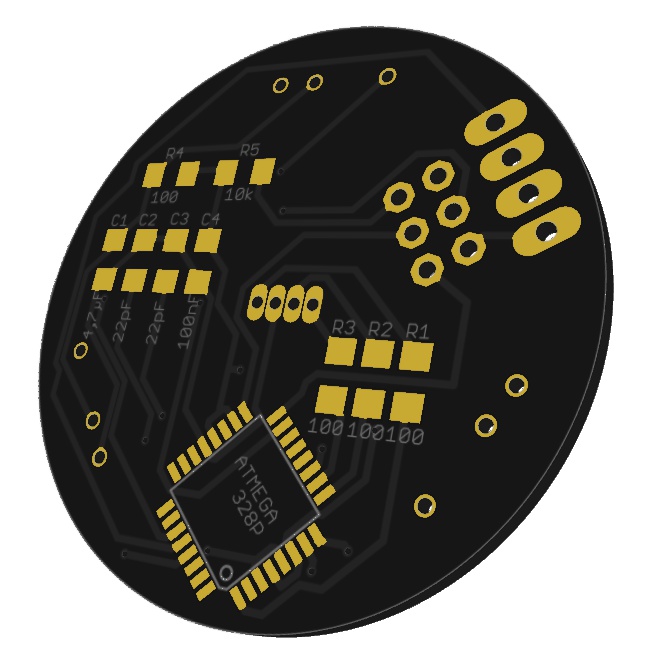
pewduino Sensor (Unterseite)
Im Netz findet man einige Seiten zu chinesischen Herstellern von Leiterplatten. Ich bin einfach mal das Risiko eingegangen und habe die Produktionsdaten der Platine versendet und per Paypal bezahlt. Es werden mir 10 Prototypen-Platinen mit einem Durchmesser von 37mm für ca. 15 Euro erstellt.
Ich habe sowas vorher noch nie gemacht, und lasse mich einfach mal überraschen, wenn es in die Hose geht, habe ich wenigstens die Erfahrung gesammelt. Ist ja auch was wert ![]()
Weiterführende Links:
http://www.cadsoft.de
http://www.elecrow.com