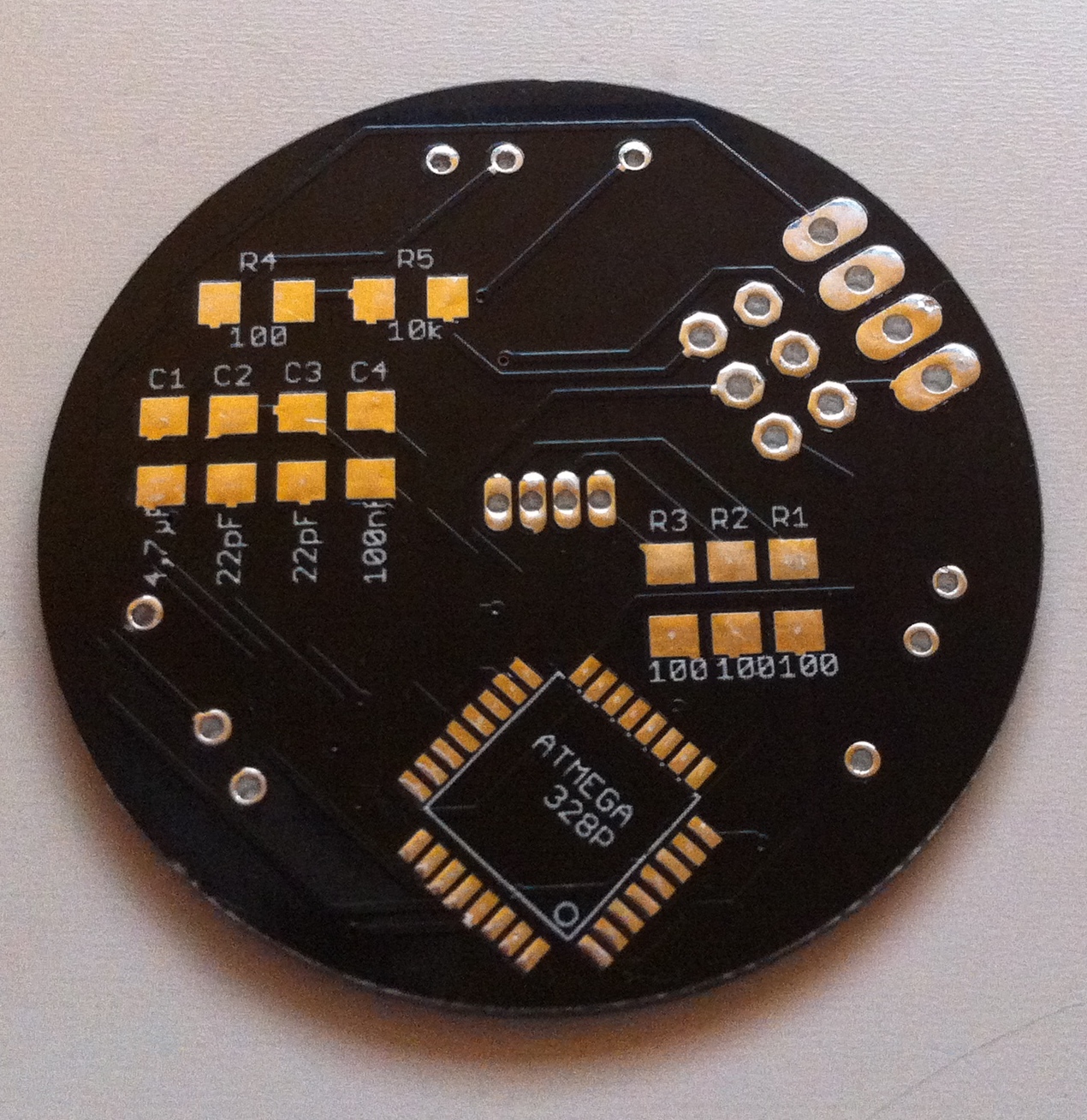
Hach! Ist es nicht wunderschön? Diese Symmetrie der IR-Receiver. Die zentrierte LED. Das tief satte Schwarz der Platine.
Hach! Ist es nicht wunderschön? Diese Symmetrie der IR-Receiver. Die zentrierte LED. Das tief satte Schwarz der Platine. 
*schwärm*
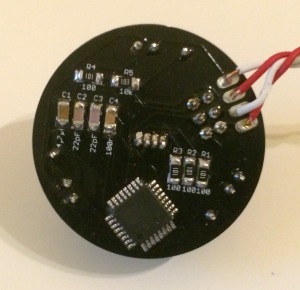
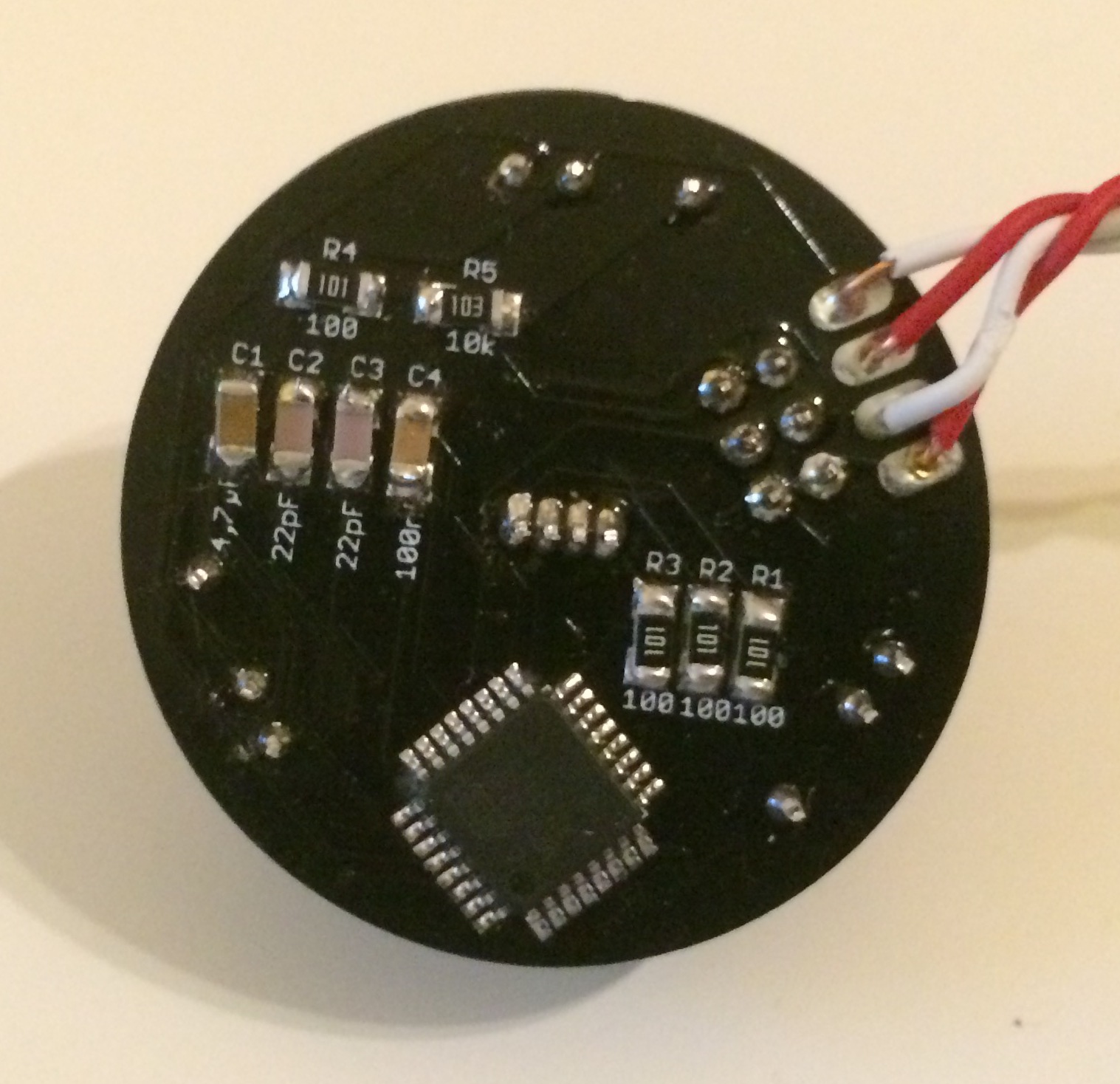
Also das mit dem SMD löten hat besser geklappt als ich gedacht hatte, aber auch hier gilt: Übung macht den Meister. Bislang habe ich 2 Sensoren mit Bauteilen bestückt.
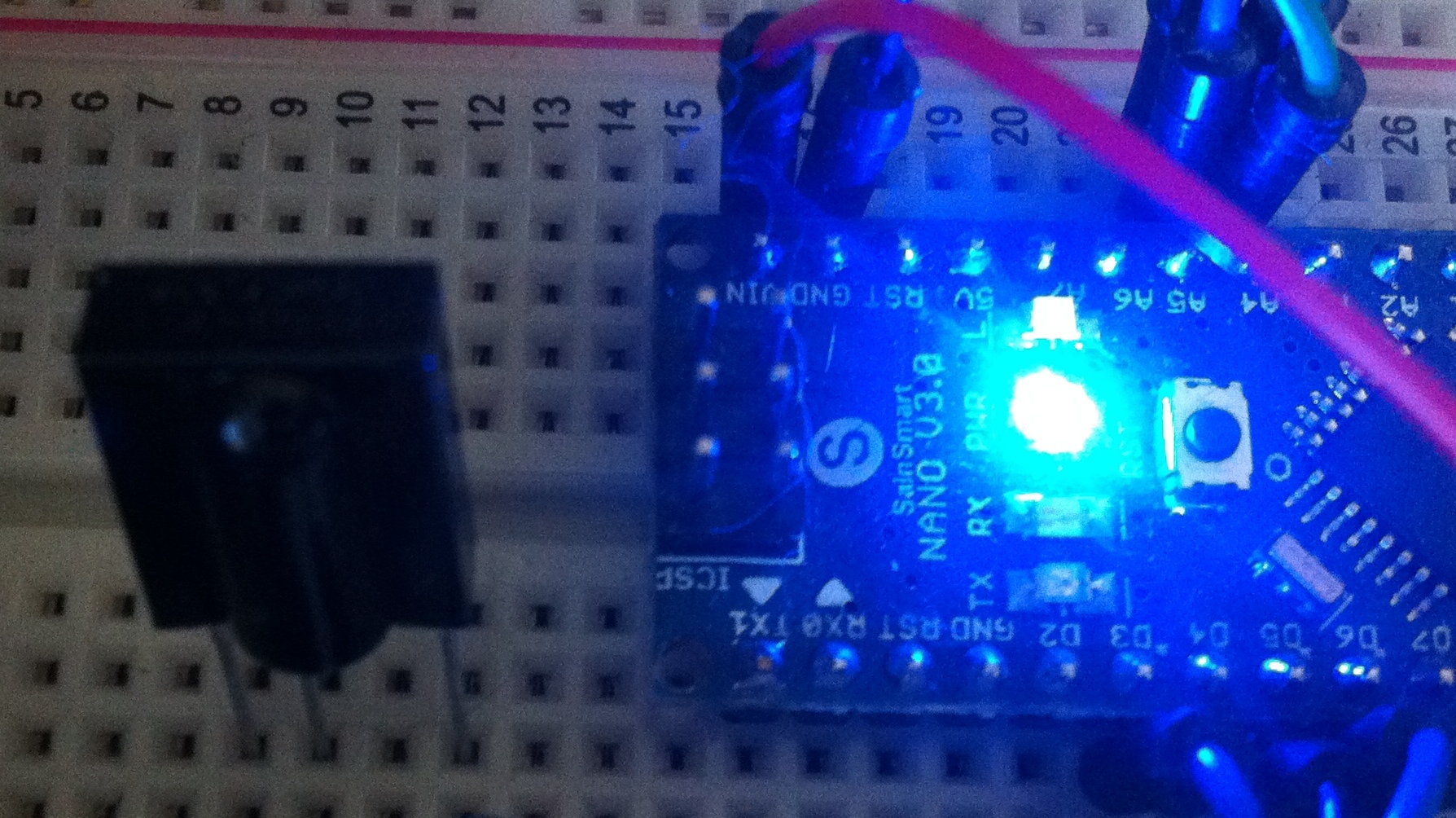
Ein Arduino Nano wurde als ISP Programmer umgebaut und mit dem 6-Pin-Header auf der Oberseite des Sensores verbunden. Dann konnte ich meine Sensor-Firmware aufspielen und testen. Und was soll ich sagen? Es klappt! Auch wenn ich zuerst auf ein paar Probleme gestoßen bin.
 Damit wären sie fertig, die ersten I2C-kompatiblen IR-Sensoren…. Tjoa…. Ein kleiner Teil vom großen Ganzen. Allerdings brauchen die Sensoren auch noch ein Gehäuse. In der Vergangenheit habe ich ja schon Sensorgehäuse gesucht bzw. Gegenstände gesucht, die sich zu einem Gehäuse umfunktionieren kann. Ergebnis war, dass für die transparente Schutzhülle der IR-Receiver eine Acryl-Halbkugel aus dem Bastelladen zum Einsatz kam. Diese habe ich mit 40 mm Durchmessern gefunden. Die Sensorplatinen haben einen Durchmesser von 38 mm, also passen sie gut in die Halbkugeln.
Damit wären sie fertig, die ersten I2C-kompatiblen IR-Sensoren…. Tjoa…. Ein kleiner Teil vom großen Ganzen. Allerdings brauchen die Sensoren auch noch ein Gehäuse. In der Vergangenheit habe ich ja schon Sensorgehäuse gesucht bzw. Gegenstände gesucht, die sich zu einem Gehäuse umfunktionieren kann. Ergebnis war, dass für die transparente Schutzhülle der IR-Receiver eine Acryl-Halbkugel aus dem Bastelladen zum Einsatz kam. Diese habe ich mit 40 mm Durchmessern gefunden. Die Sensorplatinen haben einen Durchmesser von 38 mm, also passen sie gut in die Halbkugeln.
 Die Halbkugeln haben so eine Art Nut und Feder, in meinem Fall kann ich allerdings nur die Feder gebrauchen, da diese in den “Boden” gesteckt werden muss. Die nächste Frage wäre dann: Was kann man als Deckel verwenden? In der Vergangenheit hab ich es mit Granini Saft Deckeln probiert. Allerdings haben diese nicht 100%ig gepasst. Die Halbkugel war dort immer etwas unter Spannung. Leider sind die Halbkugeln transparent. Gerne hätte ich welche aus IR-durchlässigem schwarzem Kunststoff, aber das ist dann wieder Spezialkram. Mein 2. Ansatz war IR-durchlässige Farbe zu suchen, aber ich bleib dabei: IR-durchlässiger Kram ist viel zu speziell.
Die Halbkugeln haben so eine Art Nut und Feder, in meinem Fall kann ich allerdings nur die Feder gebrauchen, da diese in den “Boden” gesteckt werden muss. Die nächste Frage wäre dann: Was kann man als Deckel verwenden? In der Vergangenheit hab ich es mit Granini Saft Deckeln probiert. Allerdings haben diese nicht 100%ig gepasst. Die Halbkugel war dort immer etwas unter Spannung. Leider sind die Halbkugeln transparent. Gerne hätte ich welche aus IR-durchlässigem schwarzem Kunststoff, aber das ist dann wieder Spezialkram. Mein 2. Ansatz war IR-durchlässige Farbe zu suchen, aber ich bleib dabei: IR-durchlässiger Kram ist viel zu speziell.
 Mehr oder weniger per Zufall fand ich die Deckel von einem Milram Buttermilch Drink (0,5L). Der Karton stand noch auf meinem Schreibtisch und der Deckel lag zwischen dem ganzen Elektronik-Kram. Diese Deckel passten ziemlich gut zu den Acryl-Halbkugeln. Allerdings sind die Deckel zu hoch und müssen runtergeschnitten werden. Das habe ich provisorisch mit einem Cutter bzw. Skalpell gemacht. Das Kunststoff ist aber relativ stabil. War keine gute Idee. Die Kanten habe ich nicht sehr gerade bekommen. Aber das war eh nur für den ersten Test. Wenn ich weitere Sensoren baue, kann ich mir eine Möglichkeit einfallen lassen, die Deckel sauber runterzukürzen.
Mehr oder weniger per Zufall fand ich die Deckel von einem Milram Buttermilch Drink (0,5L). Der Karton stand noch auf meinem Schreibtisch und der Deckel lag zwischen dem ganzen Elektronik-Kram. Diese Deckel passten ziemlich gut zu den Acryl-Halbkugeln. Allerdings sind die Deckel zu hoch und müssen runtergeschnitten werden. Das habe ich provisorisch mit einem Cutter bzw. Skalpell gemacht. Das Kunststoff ist aber relativ stabil. War keine gute Idee. Die Kanten habe ich nicht sehr gerade bekommen. Aber das war eh nur für den ersten Test. Wenn ich weitere Sensoren baue, kann ich mir eine Möglichkeit einfallen lassen, die Deckel sauber runterzukürzen.
Da mir die Deckel so gut gefallen haben, habe ich mal den Hersteller der Deckel, nicht Milram, angeschrieben und nachgefragt, ob ich die nicht einzeln kaufen könnte, denn soviel Buttermilch kann man ja nicht trinken. Das Werk in Deutschland stellt diese Deckel für die Milram Buttermilch nicht her, aber der nette Mitarbeiter der deutschen Niederlassung hat mir ähnliche Deckel mit den gleichen Maßen vorgeschlagen.  Davon habe ich dann direkt mal 100 Stück bestellt. Zur Zeit sind diese noch auf dem Versandweg zu mir. Sobald ich die Deckel habe, werde ich davon hier im Blog berichten. Achja, hier noch ein Foto vom gekürzten Deckel. Grün ist jetzt nicht so passend, schwarz wär mir lieber, aber das kann man ja irgendwie lackieren oder so. Links habe ich schon ein Stück Rand raus geschnitten, um die Kabel nach draußen zu führen. So sieht das Ganze dann zusammengebaut aus. (Ja, ich weiss, das Kunststoff ist schon leicht verkratzt, aber die Halbkugeln liegen hier auch schon ein Weilchen rum, und sind immer wieder in der Kiste gelandet.)
Davon habe ich dann direkt mal 100 Stück bestellt. Zur Zeit sind diese noch auf dem Versandweg zu mir. Sobald ich die Deckel habe, werde ich davon hier im Blog berichten. Achja, hier noch ein Foto vom gekürzten Deckel. Grün ist jetzt nicht so passend, schwarz wär mir lieber, aber das kann man ja irgendwie lackieren oder so. Links habe ich schon ein Stück Rand raus geschnitten, um die Kabel nach draußen zu führen. So sieht das Ganze dann zusammengebaut aus. (Ja, ich weiss, das Kunststoff ist schon leicht verkratzt, aber die Halbkugeln liegen hier auch schon ein Weilchen rum, und sind immer wieder in der Kiste gelandet.)
Gefällt mir:
Gefällt mir Lade...


 Endlich! Diese Woche waren die Platinen in meiner Post. Über 4 Wochen hat es gedauert, aber dafür kamen Sie nun endlich.
Endlich! Diese Woche waren die Platinen in meiner Post. Über 4 Wochen hat es gedauert, aber dafür kamen Sie nun endlich.